 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng ViệtLa storia dello sviluppo dell'inverter
Come una "vecchia conoscenza" Nel campo della regolazione industriale i convertitori di frequenza sono attivi da decenni in diversi settori. Ha la responsabilità della regolazione della velocità del motore e svolge un ruolo indispensabile nel miglioramento dei processi produttivi e nel risparmio energetico. Da un punto di vista professionale, è in realtà una sorta di apparecchiatura di controllo della potenza che utilizza la tecnologia a frequenza variabile e la tecnologia microelettronica per controllare la velocità del motore CA modificando la frequenza dell'alimentazione del motore CA.
Allora, qual è il significato dell'inverter per la regolazione della velocità del motore? Perché il controllo della velocità del motore CA è "nessuno tranne esso"? Per quanto riguarda l'importanza dell'inverter, ne comprenderemo la nascita e il processo di sviluppo dai seguenti aspetti.

Processo di nascita e sviluppo
I retroscena dell'era prima della nascita dell'inverter
Nella produzione industriale, l'uso di motori per controllare con precisione la velocità e la posizione di oggetti o componenti è un processo necessario. Ad esempio: attrezzature di sollevamento, attrezzature per telai, nastri trasportatori di materiale, riavvolgimento e svolgimento, ecc. e altri tipi di macchinari e attrezzature.
Quando la tecnologia di controllo della velocità del motore è ancora immatura, le persone possono utilizzare solo alcuni ausili meccanici per risolvere il problema del controllo del movimento degli oggetti, come cambi, frizioni, ecc., che non sono regolabili meccanicamente. Nel caso di un motore, per raggiungere un determinato scopo sportivo, è necessario sostituire il cambio, cambiare il rapporto di trasmissione o cambiare la frizione. Questo processo non solo richiede molto tempo, ma rappresenta anche una grande perdita per la macchina.
L'uso di motori per controllare accuratamente la velocità e la posizione di oggetti o componenti è un processo necessario
In un altro tipo di scenario applicativo di controllo dei fluidi, il motore fa ruotare la girante, spingendo così il flusso di gas o liquido o generando la corrispondente pressione di gas e idraulica. Nella fase iniziale, la velocità del motore non può essere controllata liberamente, il controllo del flusso e della pressione del fluido può essere ottenuto solo aprendo e chiudendo la valvola nella tubazione, il che rappresenta uno spreco di energia elettrica.
Nell'era in cui non esiste un inverter di frequenza, poiché la velocità del motore non può essere regolata liberamente, per raggiungere determinati scopi di movimento, la macchina tradizionale deve aggiungere molti accessori, il che non solo aumenta la complessità e il costo complessivo del sistema, ma ma limita anche le prestazioni e lo spazio di sviluppo del dispositivo. Per risolvere questi problemi, l'introduzione di una tecnologia di controllo della velocità del motore semplice ed efficiente è stata un punto caldo e dolente della ricerca sulla trasmissione industriale.
Nell'era in cui non esiste alcun convertitore di frequenza
Dilemma nella regolazione della velocità del motore
Il focus della prima regolazione della velocità del motore è sempre stato il motore DC. Uno dei motivi principali è che le persone comprendono innanzitutto la tecnologia di rettifica e anche le caratteristiche meccaniche del motore CC sono molto adatte per determinate scene. Il modo più semplice per regolare la tensione dell'armatura è collegare i resistori. Maggiore è la resistenza, maggiore sarà la caduta di tensione e più lenta sarà la velocità del motore CC.

Maggiore è la resistenza, maggiore è la caduta di tensione
Tuttavia, anche i difetti del motore DC sono molto evidenti. Ad esempio, l'anello collettore e la spazzola di carbone richiedono una manutenzione regolare, il processo di produzione del motore CC è complicato e i costi di produzione sono elevati. Ciò significa che i motori CC non sono adatti per un'ampia gamma di applicazioni motoristiche.
I motori CC non sono adatti per un'ampia gamma di applicazioni motoristiche
Rispetto ai motori CC, i motori CA hanno una struttura interna molto più semplice, senza commutatore e altre strutture. Sono facili da produrre e stabili, adatti per applicazioni ad alta velocità, alta tensione e alta corrente. L'unica cosa che deve essere risolta è il problema di controllo della velocità del motore CA.
Evoluzione del convertitore di frequenza
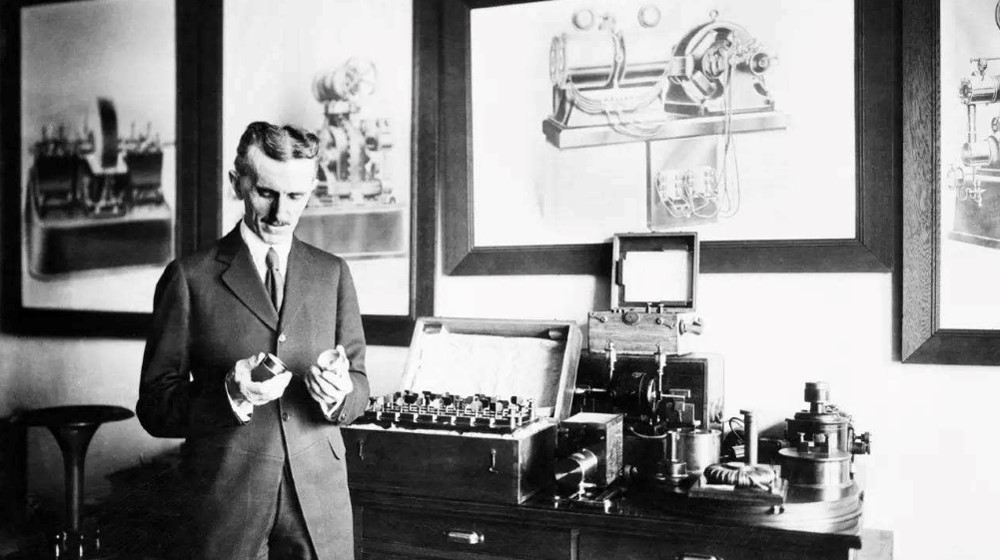
Nikola Tesla inventa il motore CA
Nel 1888 furono introdotti i motori CA e CA, ma dopo molto tempo i motori CA furono in grado di funzionare solo a una o più velocità fisse per motivi strutturali. La sua velocità è proporzionale alla frequenza e inversamente proporzionale al numero di coppie polari.
n = 60 f( 1 - s )/ p
Dalla formula precedente si può vedere che il tasso di slittamento “s” e la coppia polare “p” sono i parametri caratteristici intrinseci del motore. Non può essere modificato dopo la produzione del motore. Se si desidera regolare liberamente la velocità, modificare solo la frequenza di ingresso dell'alimentatore "f". Fondamentalmente non esiste alcun mezzo per regolare liberamente la frequenza della tensione di rete prima della nascita dell'inverter.

Il tasso di slittamento "s" e la coppia polare “p” sono i parametri caratteristici intrinseci del motore
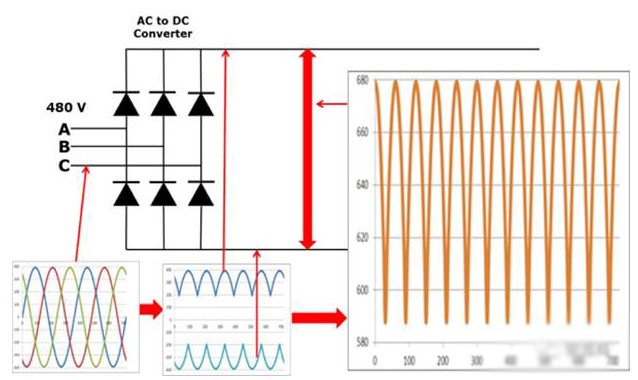
Negli anni '80, con lo sviluppo della tecnologia dei semiconduttori, in particolare dei microprocessori e dei tiristori, i microprocessori sono stati utilizzati per controllare lo stato di conduzione dei tiristori. In questo modo, il microprocessore può essere utilizzato per controllare la chiusura della conduzione degli elementi di commutazione del ponte superiore e inferiore e il funzionamento continuo può essere eseguito secondo un tempo specifico, in modo che la corrente continua possa essere convertita in corrente alternata, che è quella che spesso chiamiamo tecnologia inverter; Allo stesso tempo, possiamo regolare il ciclo operativo del componente di potenza per l'apertura e la chiusura, il che significa che è possibile realizzare la regolazione della frequenza di uscita dell'inverter.
Infine, in combinazione con la tecnologia di rettifica, possiamo convertire rapidamente la frequenza standard della rete nella frequenza corrispondente e l'AC della tensione corrispondente in base all'ampiezza e alla frequenza dell'alimentazione richiesta, modificando così la frequenza di ingresso del motore per realizzare il controllo di regolazione della velocità del motore CA. Dopo un lungo periodo di sviluppo tecnologico e sforzi incessanti degli scienziati, l'inverter di frequenza è stato aggiornato ed evoluto in un'unica applicazione ed è gradualmente diventato quello che vediamo oggi.

Prodotti VEICHI
Comprendiamo lo sviluppo dell'inverter fin dall'inizio e quindi introduciamo lo sviluppo della tecnologia di conversione di frequenza. In sintesi, è possibile suddividerlo sostanzialmente nelle tre fasi seguenti.
1. Sostituzione dell'elettronica di potenza
Con il continuo sviluppo di dispositivi a semiconduttore, utilizziamo un dispositivo completamente controllato invece di un tiristore semi-controllato (SCR) per modificare la forma d'onda di uscita in una forma d'onda PWM modulata in larghezza di impulso, che riduce notevolmente le componenti armoniche, il la gamma di velocità del motore asincrono viene aumentata e la fluttuazione della coppia viene ridotta.
La frequenza operativa dell'IGBT può generalmente raggiungere tra 10 e 20 kHz. Rispetto al BJT del triodo BJT, la frequenza operativa è un ordine di grandezza superiore, soprattutto in termini di alcuni indicatori di tensione e corrente, che hanno superato l'uso del BJT, come la tolleranza ai picchi di corrente, il picco di blocco della tensione e così via. Grazie all'uso degli IGBT, la frequenza portante può essere aumentata e può essere formata anche la forma d'onda PWM richiesta, che può ridurre notevolmente il rumore armonico. Pertanto, nelle attuali applicazioni degli inverter, l'IGBT ha sostanzialmente sostituito il BJT.
IPM è il modulo di potenza intelligente; utilizza IGBT come dispositivo di commutazione, che non solo integra il dispositivo di commutazione di potenza e il circuito di pilotaggio. Integra inoltre circuiti di rilevamento guasti come sovratensione, sovracorrente e surriscaldamento e può inviare segnali di rilevamento alla CPU. Anche se si verifica un incidente con il carico o un uso improprio, si può garantire che l'IPM stesso sarà esente da danni.
Modulo IGBT
2. Sviluppo di metodi di controllo
Il precedente metodo di controllo dell'inverter adottava il rapporto di tensione costante che è il controllo V/f. V è il valore efficace della tensione. La modifica di V/f può solo regolare il flusso e la coppia a regime stazionario del motore. Per migliorare la coppia in condizioni di bassa frequenza, è necessario un aumento della coppia. Di solito, la tensione viene compensata e alcuni possono compensare la caduta di tensione dell'avvolgimento dello statore con le variazioni di carico.
Successivamente, sull'inverter è apparso un nuovo metodo di controllo: il controllo vettoriale. Il suo principio di base è quello di stabilire un modello del motore CC equivalente e la corrente dello statore della macchina asincrona viene scomposta separatamente nella componente di eccitazione e nella componente di coppia. Il controllo del vettore di eccitazione è la cosa più importante, quindi il controllo vettoriale è chiamato controllo ad orientamento di campo e il controllo della coppia è indiretto.
Diagramma della struttura del sistema di controllo vettorialeIl controllo vettoriale richiede operazioni di trasformazione delle coordinate e la necessità di rilevare il segnale di velocità effettivo, quindi il sensore di velocità è necessario per il feedback che è il controllo vettoriale ad anello chiuso. Quindi, viene proposto uno schema vettoriale di controllo vettoriale sensorless della velocità, che viene calcolato in base alla tensione di fase e alla corrente di fase del funzionamento effettivo del motore e ai parametri degli avvolgimenti dello statore e del rotore, quindi ai valori di osservazione del flusso del rotore e la corrente di coppia, realizzando così il controllo vettoriale del campo orientato.
Un altro modo di sviluppare in parallelo con il controllo vettoriale è chiamato Direct Torque Control (DTC), che enfatizza il controllo diretto della coppia. Il metodo si basa sulla tensione e sulla corrente misurate del motore per calcolare il valore stimato del flusso e della coppia del motore e, dopo aver controllato la coppia, è possibile controllare anche la velocità del motore.
3. Diversificazione funzionale
L'attuale convertitore di frequenza si basa su un microprocessore molto potente, oltre ai compiti di base della regolazione della velocità di conversione della frequenza del motore, ci sono anche una varietà di funzioni integrate. Ad esempio:
(1) Accelerazione e decelerazione automatiche.
(2) Il programma viene eseguito.
(3) Funzionamento automatico di risparmio energetico.
(4) Autoapprendimento dei parametri del motore.
(5) Funzionamento del controllo PID.
(6) Funzioni di comunicazione e feedback.
Negli anni '70, gli ingegneri Siemens proposero per primi la teoria del controllo vettoriale del motore asincrono per risolvere il problema del controllo della coppia del motore CA. Per quanto riguarda il controllo diretto della coppia, la letteratura generale ritiene che sia stato insegnato dal professor M. Depenbrock dell'Università della Ruhr e I. Takahashi del Giappone sia stato proposto separatamente nel 1985. Si può vedere che i risultati della ricerca sul controllo motorio in paesi stranieri sono precedenti a anche quelli cinesi e i loro prodotti inverter stanno entrando nel campo visivo del pubblico prima dei nostri marchi nazionali.

VEICHI
Ora, grazie all'apprendimento e alla ricerca continua di molti ingegneri in questo campo in Cina, l'industria nazionale degli inverter, in termini di marchio, prestazioni e prezzo, ha ampiamente soddisfatto lo stato di sviluppo dell'industria cinese. In qualità di azienda specializzata in ricerca e sviluppo, produzione e assistenza di inverter di frequenza, VEICHI si è concentrata sulla ricerca in questo campo e produce con cura ogni prodotto di inversione di frequenza per contribuire al futuro della produzione intelligente nel 2025.