 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng ViệtCos'è l'algoritmo di controllo PID
Nelle applicazioni pratiche dell'ingegneria, l'algoritmo di controllo PID è l'algoritmo più utilizzato. Il passaggio seguente è l'introduzione specifica di ciò che è l'algoritmo di controllo PID.
Qual è il principio di funzionamento dell'algoritmo di controllo PID?
La legge di controllo del regolatore più utilizzata per il controllo proporzionale, integrale e differenziale è denominata algoritmo di controllo PID, noto anche come controllo PID o regolazione PID. I controllori PID hanno una storia di quasi 70 anni. La struttura semplice, la buona stabilità e le prestazioni affidabili sono diventate una delle principali tecnologie di controllo industriale. Quando la struttura e i parametri dell'oggetto controllato non sono forniti completamente, è necessario fare affidamento sulla struttura e sui parametri del controller del sistema sull'esperienza e sulla messa in servizio in loco e l'applicazione della tecnologia di controllo PID è la tecnologia più conveniente. Per l'algoritmo di controllo PID, sono disponibili il controllo PI e il controllo PD. Il controller PID funziona calcolando i valori di controllo proporzionale, integrale e differenziale.
Attualmente esistono 3 tipi di algoritmi di controllo PID relativamente semplici, vale a dire: algoritmo incrementale, algoritmo del tipo di posizione, algoritmo differenziale. Questi algoritmi di controllo sono gli algoritmi più semplici e basilari che hanno le proprie caratteristiche e soddisfano i requisiti generali della maggior parte dei controlli.
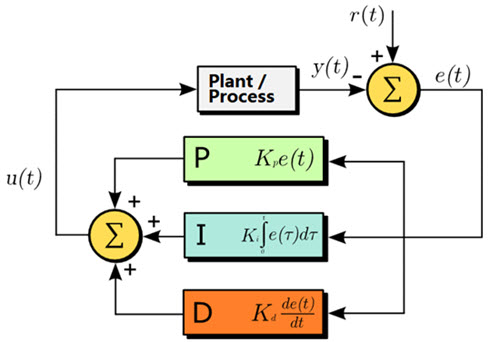
La formula completa è la seguente:
u (t) = Kp * e (t) + KiSe (t) + Kd [e (t) - e (t-1)] + u0
Nel processo di debug dell'algoritmo di controllo PID, dovremmo notare i seguenti passaggi:
1. Chiudi I e D, il che significa impostarli a 0 e aumentare P per produrre oscillazioni;
2. Riduci P per trovare il punto critico di oscillazione;
3. Aumenta I per raggiungere il valore target;
4. Riaccendere per vedere se il superamento, l'oscillazione e il tempo di stabilizzazione sono coerenti con i requisiti;
5. Aggiungere opportunamente alcuni termini differenziali per le condizioni di superamento e oscillazione;
Metodi di regolazione dei parametri del controller PID
La regolazione dei parametri del controller PID è il fulcro della progettazione del sistema di controllo del motore vettoriale. Esistono molti metodi di regolazione dei parametri del controller PID e si possono riassumere due categorie:
1. Messa a punto del calcolo teorico. Determina i parametri del controller in base al modello matematico e ai calcoli teorici. I dati calcolati con questo metodo non possono essere utilizzati direttamente e devono essere adeguati e modificati.
2.Il metodo di ottimizzazione ingegneristica, che si basa principalmente sull'esperienza ingegneristica per eseguire direttamente i test del sistema di controllo, è facile da comprendere ed è ampiamente utilizzato nella pratica ingegneristica. Per i metodi di regolazione dei parametri del controller PID, esistono il metodo del rapporto critico, il metodo della curva di risposta e il metodo del decadimento.
I metodi hanno le proprie caratteristiche e vengono prima testati e poi viene creata una formula empirica ingegneristica per implementare la regolazione dei parametri del controller. Al giorno d'oggi il sistema di controllo PID è ampiamente utilizzato nell'automazione PLC e nel convertitore di frequenza, mentre il metodo più comunemente utilizzato è il metodo del rapporto critico.
Se hai bisogno di ulteriori informazioni su cos'è il sistema di controllo PID e il suo principio di funzionamento, non esitare a contattarci e il nostro supporto tecnico ti risponderà al più presto.